


Visual odometry
Motasem Nawaf, Pierre Drap
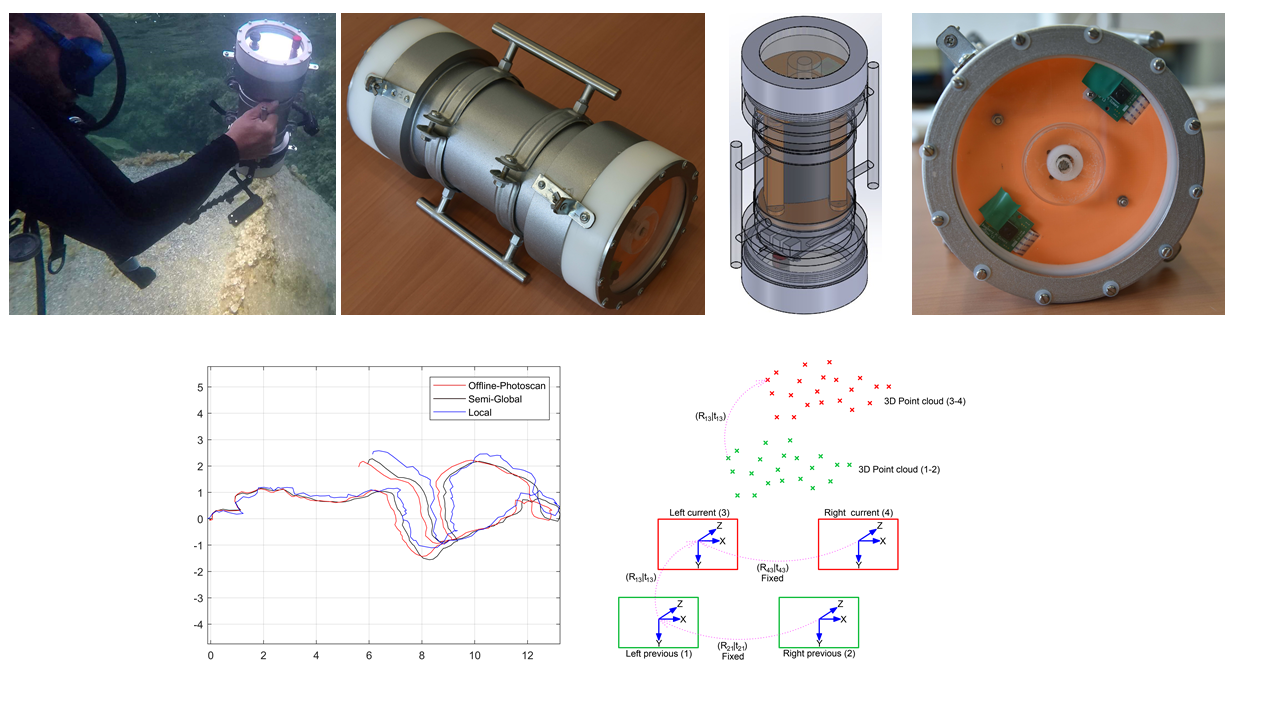
Mobile systems nowadays undergo a growing need for self-localization to accurately determine their absolute/relative position over time. Despite the existence of very efficient technologies that can be used on-ground (indoor/outdoor) and in-air such as Global Positioning System (GPS) and radio beacons, etc. However, in the underwater context most of these signals are jammed so that the corresponding techniques cannot be used. On the other side, solutions based on active acoustics such as imaging sonars and Doppler Velocity Logs (DVL) devices remain expensive and require high technical skills for deployment and operation. Moreover, their size specifications prevent their integration within small mobile systems or even being hand held. The research for an alternative is ongoing, notably, the recent advances in embedded systems outcome relatively cheap, small but powerful devices. This opens interesting perspectives to develop a light visual odometry approach that provides relative path in real-time, this describes the carried our research. The developed solutions are integrated within underwater archaeological survey where it plays an important role to facilitate image acquisition
In common approaches of visual odometry, a significant part of the overall processing time is spent on feature points detection, description and matching. Whereas another significant part is occupied by the optimization phase, namely the bundle adjustment (BA). A trade-off arises in this later case, a local BA suffers from rotation and translation drifts that grows with time. Whereas solutions based on using global BA require more computational resources which are very limited in our context. Similarly, the simultaneous localization and mapping (SLAM) approaches which are known to perform good loop closure, are computationally inconstant due to the increasing amount of handled data with time.
Our research activities focus on providing solutions to the mentioned problems and hence to reduce the processing time towards a real-time performance while maintaining good ego-motion estimation accuracy. Mainly we propose solutions to speed up the stereo matching using low level feature detection and matching procedure, we benefit from the fixed lighting configuration to compute fast rough depth estimation that is used to guide the stereo matching, which speed up significantly the visual odometry process. Besides, we propose a semi-global BA approach where the estimated poses are represented in a stochastic manner, alongside with a method to estimate the uncertainty associated to each recovered pose estimation.
Here is a list of related published papers:
• Nawaf, M. M., Boï, J.-M., Merad, D., Royer, J.-P., and Drap, P.: Low Cost Embedded Stereo System For Underwater Surveys, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLII-2/W8, 179-186, https://doi.org/10.5194/isprs-archives-XLII-2-W8-179-2017, 2017.
• Nawaf, M. M.; Drap, P.; Royer, J. P.; Merad, D. and Saccone, M. "Towards Guided Underwater Survey Using Light Visual Odometry". ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLII-2/W3, 527-533, 2017.
• Mohamad Motasem Nawaf, Bilal Hijazi, Djamal Merad, Pierre Drap, "Guided Underwater Survey Using Semi-Global Visual Odometry". International Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT), 2016.
• Drap Pierre, Merad Djamal, Hijazi Bilal, Gaoua Lamia, Nawaf Mohamad Motasem, Saccone Mauro, Chemisky Bertrand, Seinturier Julien, Sourisseau Jean-Christophe, Gambin Timmy, Castro Filipe. " Underwater Photogrammetry and Object Modeling : A Case Study of Xlendi Wreck in Malta." Sensors 15, no. 12 : 30351-30384, 2015.
